D3. Interaccions entre sòlids rígids
[math]\displaystyle{ \newcommand{\uvec}{\overline{\textbf{u}}}
\newcommand{\vvec}{\overline{\textbf{v}}}
\newcommand{\evec}{\overline{\textbf{e}}}
\newcommand{\Omegavec}{\overline{\mathbf{\Omega}}}
\newcommand{\velang}[2]{\Omegavec^{\textrm{#1}}_{\textrm{#2}}}
\newcommand{\Alfavec}{\overline{\mathbf{\alpha}}}
\newcommand{\accang}[2]{\Alfavec^{\textrm{#1}}_{\textrm{#2}}}
\newcommand{\ds}{\textrm{d}}
\newcommand{\hs}{\textrm{h}}
\newcommand{\Ns}{\textrm{N}}
\newcommand{\Fs}{\textrm{F}}
\newcommand{\ms}{\textrm{m}}
\newcommand{\ts}{\textrm{t}}
\newcommand{\us}{\textrm{u}}
\newcommand{\vs}{\textrm{v}}
\newcommand{\Rs}{\textrm{R}}
\newcommand{\Ts}{\textrm{T}}
\newcommand{\Ls}{\textrm{L}}
\newcommand{\Bs}{\textrm{B}}
\newcommand{\Ms}{\textrm{M}}
\newcommand{\es}{\textrm{e}}
\newcommand{\fs}{\textrm{f}}
\newcommand{\is}{\textrm{i}}
\newcommand{\js}{\textrm{j}}
\newcommand{\rs}{\textrm{r}}
\newcommand{\ss}{\textrm{s}}
\newcommand{\Os}{\textbf{O}}
\newcommand{\Gs}{\textbf{G}}
\newcommand{\Cbf}{\textbf{C}}
\newcommand{\Or}{\Os_\Rs}
\newcommand{\Qs}{\textbf{Q}}
\newcommand{\Cs}{\textbf{C}}
\newcommand{\Ps}{\textbf{P}}
\newcommand{\Ss}{\textbf{S}}
\newcommand{\P}{\textrm{P}}
\newcommand{\Q}{\textrm{Q}}
\newcommand{\deg}{^\textsf{o}}
\newcommand{\xs}{\textsf{x}}
\newcommand{\ys}{\textsf{y}}
\newcommand{\zs}{\textsf{z}}
\newcommand{\dert}[2]{\left.\frac{\ds{#1}}{\ds\ts}\right]_{\textrm{#2}}}
\newcommand{\ddert}[2]{\left.\frac{\ds^2{#1}}{\ds\ts^2}\right]_{\textrm{#2}}}
\newcommand{\vec}[1]{\overline{#1}}
\newcommand{\vecbf}[1]{\overline{\textbf{#1}}}
\newcommand{\vecdot}[1]{\overline{\dot{#1}}}
\newcommand{\OQvec}{\vec{\Os\Qs}}
\newcommand{\QPvec}{\vec{\Qs\Ps}}
\newcommand{\OPvec}{\vec{\Os\textbf{P}}}
\newcommand{\OCvec}{\vec{\Os\Cs}}
\newcommand{\OGvec}{\vec{\Os\Gs}}
\newcommand{\abs}[1]{\left|{#1}\right|}
\newcommand{\braq}[2]{\left\{{#1}\right\}_{\textrm{#2}}}
\newcommand{\vector}[3]{
\begin{Bmatrix}
{#1}\\
{#2}\\
{#3}
\end{Bmatrix}}
\newcommand{\vecdosd}[2]{
\begin{Bmatrix}
{#1}\\
{#2}
\end{Bmatrix}}
\newcommand{\vel}[2]{\vvec_{\textrm{#2}} (\textbf{#1})}
\newcommand{\acc}[2]{\vecbf{a}_{\textrm{#2}} (\textbf{#1})}
\newcommand{\accs}[2]{\vecbf{a}_{\textrm{#2}}^{\textrm{s}} (\textbf{#1})}
\newcommand{\accn}[2]{\vecbf{a}_{\textrm{#2}}^{\textrm{n}} (\textbf{#1})}
\newcommand{\velo}[1]{\vvec_{\textrm{#1}}}
\newcommand{\accso}[1]{\vecbf{a}_{\textrm{#1}}^{\textrm{s}}}
\newcommand{\accno}[1]{\vecbf{a}_{\textrm{#1}}^{\textrm{n}}}
\newcommand{\re}[2]{\Re_{\textrm{#2}}(\textbf{#1})}
\newcommand{\psio}{\dot{\psi}_0}
\newcommand{\Pll}{\textbf{P}_\textrm{lliure}}
\newcommand{\agal}[1]{\vecbf{a}_{\textrm{Gal}} (#1)}
\newcommand{\angal}[1]{\vecbf{a}_{\textrm{NGal}} (#1)}
\newcommand{\vgal}[1]{\vecbf{v}_{\textrm{Gal}} (#1)}
\newcommand{\fvec}[2]{\overline{\mathbf{F}}_{\textrm{#1}\rightarrow\textrm{#2}}}
\newcommand{\mvec}[2]{\overline{\mathbf{M}}_{\textrm{#1}\rightarrow\textrm{#2}}}
}[/math]
Com s’ha vist a la unitat D2, les interaccions entre parelles de partícules [math]\displaystyle{ \Ps }[/math] i [math]\displaystyle{ \Qs }[/math] queden descrites per una única força de direcció [math]\displaystyle{ \overline{\Ps \Qs} }[/math] . Quan la interacció és entre parelles de sòlids rígids (que es poden considerar com a dos conjunts d’infinites partícules), la descripció partícula a partícula portaria a treballar amb un sistema d’infinites forces. En aquest cas, cal passar a una descripció compacta d’aquest sistema de forces que retingui, però, la informació necessària per estudiar la dinàmica dels sòlids rígids: el sistema de forces es substitueix per un torsor resultant.
Aquesta unitat introdueix el concepte de torsor associat a un sistema de forces, i després l’aplica a les diverses interaccions entre sòlids (a distància, de contacte i per mitjà d’elements intermedis).
D3.1 Torsor associat a un sistema de forces
La reducció d’un sistema de forces sobre un sòlid rígid a un torsor és absolutament necessària quan el nombre de forces és molt elevat (infinit). Quan es tracta d’un sistema de poques forces, sol ser opcional.
Una operació matemàtica eficaç per reduir el nombre de forces sobre un sòlid S és la suma: per molt elevat que sigui el nombre de forces, la suma condueix a una única força resultant. Aquesta reducció dràstica, però, implica una pèrdua d’informació essencial en molts casos. Sempre i quan no interessi estudiar la deformació dels objectes (és a dir, quan només s’estudiï la dinàmica de sòlids rígids), això es resol afegint un segon vector a la descripció compacta del sistema: el moment (o parell) resultant respecte d’un punt [math]\displaystyle{ \Qs }[/math]. El conjunt d’aquests dos vectors (força i moments resultants) és el torsor del sistema de forces en el punt [math]\displaystyle{ \Qs }[/math] (Figura D3.1).

A tall d’exemple, considerem el cas d’una barra rígida inicialment en repòs que se sotmet a un sistema de forces amb força resultant nul·la. La Figura D3.2 presenta tres situacions diferents que corresponen a aquesta resultant: (a) lliure de forces, (b) forces paral·leles a la barra, (c) forces perpendiculars a la barra. En els dos casos primers (a, b), el sistema de forces no modifica l’estat de repòs. En el tercer (c), les forces provoquen una rotació horària de la barra. El torsor resultant en qualsevol punt permet distingir entre (c) i (a, b).

La força resultant no depèn mai del punt on es calcula el torsor. En canvi, el moment resultant en general sí que en depèn (Figura D3.3).
.png) |
[math]\displaystyle{
\hspace{1cm}\sum \overline{\Ms}(\Os) = (\Ls\Fs_\Ps+\Ls\Fs_\Qs) \otimes
}[/math]
[math]\displaystyle{ \hspace{1cm}\sum \overline{\Ms}(\Ps) = 2\Ls\Fs_\Qs \otimes }[/math] [math]\displaystyle{ \hspace{1cm}\sum \overline{\Ms}(\Qs) = 2\Ls\Fs_\Ps \otimes }[/math] [math]\displaystyle{ \hspace{1cm}\sum \overline{\Ms}(\Ss) = (3\Ls\Fs_\Ps-\Ls\Fs_\Qs) \otimes }[/math] |
El torsor resultant es representa en el punt on s’ha calculat el moment resultant (Figura D3.4).

El moment resultant en un punt [math]\displaystyle{ \Qs’ }[/math] es pot obtenir a partir del torsor en un punt [math]\displaystyle{ \Qs }[/math]:
[math]\displaystyle{ \overline{\mathbf{M}}_\mathrm{R}(\Qs ')=\overline{\mathbf{M}}_\mathrm{R}(\Qs) + \overline{\Qs '\Qs} \times \overline{\mathbf{F}}_\Rs }[/math]
💭 Demostració ➕
- [math]\displaystyle{ \overline{\mathbf{M}}_\Rs(\Qs)=\sum \overline{\Qs \Ps_\is} \times \overline{\mathbf{F}}_\is }[/math]
- [math]\displaystyle{ \overline{\mathbf{M}}_\Rs(\Qs ')=\sum \overline{\Qs ' \Ps_\is} \times \overline{\mathbf{F}}_\is=\sum (\overline{\Qs ' \Qs}+\overline{\Qs \Ps_\is}) \times \overline{\mathbf{F}}_\is=\sum \overline{\Qs ' \Qs} \times \overline{\mathbf{F}}_\is + \sum \overline{\Qs \Ps_\is} \times \overline{\mathbf{F}}_\is=\overline{\Qs ' \Qs} \times (\sum \overline{\mathbf{F}}_\is) + \sum \overline{\Qs \Ps_\is} \times \overline{\mathbf{F}}_\is }[/math]
- [math]\displaystyle{ \overline{\mathbf{M}}_\Rs(\Qs ')=\overline{\Qs ' \Qs} \times \overline{\mathbf{F}}_\Rs+\overline{\mathbf{M}}_\Rs(\Qs) }[/math]
D3.2 Atracció gravitatòria
El càlcul del torsor resultant gravitatori sobre un sòlid [math]\displaystyle{ \mathrm{S}_\mathrm{P} }[/math] per causa d’un sòlid [math]\displaystyle{ \mathrm{S}_\mathrm{Q} }[/math] no és senzill. La força gravitatòria resultant sobre un diferencial de massa dm([math]\displaystyle{ \Ps }[/math]) de [math]\displaystyle{ \mathrm{S}_\mathrm{P} }[/math] ([math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{S}_{\mathrm{Q}} \rightarrow \Ps} }[/math]) prové de les forces ([math]\displaystyle{ \overline{\mathbf{F}}_{\Qs \rightarrow \Ps} }[/math] ) que cada diferencial de massa de [math]\displaystyle{ \mathrm{S}_\mathrm{Q} }[/math] exerceix sobre [math]\displaystyle{ \Ps }[/math] (Figura D3.5). El torsor resultant sobre [math]\displaystyle{ \mathrm{S}_\mathrm{P} }[/math] s’obté a partir de totes aquestes forces [math]\displaystyle{ \overline{\mathbf{F}}_{\Qs \rightarrow \Ps} }[/math] sobre tots els diferencials de massa de [math]\displaystyle{ \mathrm{S}_\mathrm{P} }[/math] .

Quan es tracta de l’atracció gravitatòria terrestre ([math]\displaystyle{ \mathrm{S}_\mathrm{Q} = \mathrm{Terra} }[/math]) sobre un sòlid de petites dimensions comparades amb les de la Terra i prop de la superfície terrestre, és usual emprar l’aproximació de camp uniforme: les forces [math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{S}_{\mathrm{Q}} \rightarrow \Ps} }[/math] pràcticament paral·leles entre elles i el seu valor és [math]\displaystyle{ \mathbf{F}_{\mathrm{S}_{\mathrm{Q}} \rightarrow \Ps} = \mathrm{gdm}(\Ps) }[/math] , amb [math]\displaystyle{ \mathrm{g} }[/math] constant i igual al camp gravitatori a la superfície terrestre:[math]\displaystyle{ \mathrm{g}=\mathrm{G}_0 \frac{\mathrm{M}_\Ts}{\Rs_\Ts^2} }[/math](on [math]\displaystyle{ \mathrm{G}_0 }[/math] és la constant universal de gravitació, i [math]\displaystyle{ \mathrm{M}_\Ts }[/math] i [math]\displaystyle{ \Rs_\Ts }[/math] són la massa i el radi de la Terra, respectivament). En aquest cas, es pot demostrar que existeix un punt de [math]\displaystyle{ \mathrm{S}_\mathrm{P} }[/math] en el qual el torsor gravitatori es redueix a una força resultant [math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{S}_{\mathrm{T}} \rightarrow \mathrm{S}_{\mathrm{P}}} }[/math] de valor mg (on m és la massa de [math]\displaystyle{ \mathrm{S}_\mathrm{P} }[/math] ) dirigida cap al centre de la terra, i un moment resultant gravitatori nul. Aquest punt s’anomena centre de gravetat del sòlid, es representarà amb la lletra G (Figura D3.6).

D3.3 Interacció per mitjà de molles i amortidors
Molles i amortidors lineals
Quan una molla o un amortidor lineal connecta dos punts [math]\displaystyle{ \Ps }[/math] i [math]\displaystyle{ \Qs }[/math] de dos sòlids diferents, cal assegurar que la connexió es fa de manera que la força que es transmet entre els punts té la direcció de l’element, i que no es transmet cap moment (o parell).
En alguns casos, això es pot aconseguir inserint l’element entre dos trams de fil inextensible (Figura D3.7a). En aquest cas, la força que introdueix entre els punts [math]\displaystyle{ \Ps }[/math] i [math]\displaystyle{ \Qs }[/math] només pot ser d’atracció (a causa del caràcter unilateral de l’actuació del fil).
En d’altres casos, cal recórrer a unions mitjançant articulacions (si es tracta d’un problema pla, Figura D3.7b) o ròtules esfèriques (si és un problema 3D).

✏️ Exemple D3.1: força de repulsió d’una molla i un amortidor lineals de comportament lineal

- La molla, que és de comportament lineal, actua entre el suport fix a terra i un eix vertical que està en contacte amb la barra. Per a [math]\displaystyle{ \theta = 0 }[/math] , el sistema està en equilibri, i la força que la molla exerceix entre els seus extrems és [math]\displaystyle{ \mathrm{F}_0 }[/math] .
- En absència de molla, la barra, que està articulada al suport al punt [math]\displaystyle{ \mathbf{O} }[/math], tendiria a caure (rotació horària). Si per a [math]\displaystyle{ \theta = 0 }[/math] hi ha equilibri, la molla ha d’estar fent necessàriament una repulsió entre els seus extrems en aquesta configuració. Per tant, el més lògic és calcular l’expressió de la força de la molla per a una configuració general com a força repulsiva:
[math]\displaystyle{ \mathrm{F}_{\mathrm{rep}}^{\mathrm{molla}}= \mathrm{F}_0 - \mathrm{k}\Delta\rho=\mathrm{F}_0-\mathrm{k}[\rho(\theta) - \rho(\theta=0)] }[/math].
L’increment [math]\displaystyle{ \Delta \rho }[/math] de llargària de la molla a partir de l’equilibri és proporcional a la tangent de l’angle:[math]\displaystyle{ \mathrm{tan}\theta=\Delta\rho/\mathrm{L} }[/math]. Per tant: [math]\displaystyle{ \mathrm{F}_{\mathrm{rep}}^{\mathrm{molla}}=\mathrm{F}_0-\mathrm{kL}\mathrm{tan}\theta }[/math].
La força de repulsió de l’amortidor s’obté a partir de l’allargament anterior per derivació:
[math]\displaystyle{ \rho=\mathrm{Ltan}\theta \Rightarrow \dot{\rho} = \frac{\mathrm{L}\dot{\theta}}{\mathrm{cos}^2\theta} \Rightarrow \mathrm{F}_{\mathrm{rep}}^{\mathrm{amort}}=\mathrm{c}\dot{\rho}=-\mathrm{c} \frac{\mathrm{L}\dot{\theta}}{\mathrm{cos}^2\theta} }[/math]
✏️ Exemple D3.2: força d’atracció d’una molla i un amortidor lineals de comportament lineal

- La molla, que és de comportament lineal, té un extrem fix al xassís del vehicle, i l’altre a un fil que s’enrotlla al damunt d’un corró de radi [math]\displaystyle{ \rs }[/math] solidari a la roda de radi [math]\displaystyle{ 2\rs }[/math], que no llisca al damunt del terra. Per a [math]\displaystyle{ \xs = 0 }[/math] , la molla està estirada i exerceix una força [math]\displaystyle{ \mathrm{F}_0 }[/math] entre els seus extrems.

- La coordenada [math]\displaystyle{ \xs }[/math] descriu la posició del xassís respecte del terra, i per tant també la del centre de la roda de radi [math]\displaystyle{ 2\rs }[/math]. En tenir la molla un extrem lligat a un fil que s’enrotlla al corró, el desplaçament d’aquest extrem respecte del terra es pot obtenir per integració de la seva velocitat.
- Vistes les velocitats dels dos extrems de la molla, és evident que s’escurça. La velocitat d’escurçament entre els extrems és:
- [math]\displaystyle{ \mathrm{v}_{\mathrm{escurçament}}(=-\dot{\rho})=\frac{3}{2}\dot{\xs}-\dot{\xs}=\frac{1}{2}\dot{\xs} }[/math], i per tant, l’escurçament de la molla a partir de la configuració [math]\displaystyle{ \xs = 0 }[/math] és:[math]\displaystyle{ \frac{1}{2}\xs(=-\Delta \rho) }[/math]
- L’expressió de la força d’atracció de la molla (ja que la [math]\displaystyle{ \mathrm{F}_0 }[/math] és una atracció ja que la molla està estirada per a [math]\displaystyle{ \xs = 0 }[/math] ) és:[math]\displaystyle{ \mathrm{F}_{\mathrm{at}}^{\mathrm{molla}} + \mathrm{k}\Delta \rho = \mathrm{F}_0 - \frac{1}{2}\mathrm{k}\xs }[/math]
- La força d’atracció de l’amortidor s’obté a partir de la velocitat l’escurçament que ja s’ha trobat:
- [math]\displaystyle{ \mathrm{v}_{\mathrm{escurçament}}(=-\dot{\rho})=\frac{1}{2}\dot{\xs} \Rightarrow \mathrm{F}_{\mathrm{at}}^{\mathrm{amort}}=\mathrm{c} \dot{\rho}=-\frac{1}{2} \mathrm{c} \dot{\xs} }[/math]
Molles i amortidors torsionals
Les molles i els amortidors torsionals introdueixen moments però no forces entre els dos sòlids que connecten. Igual que en el cas dels elements lineals, la unió a cadascun dels sòlids ha de garantir que només es transmet un moment en una direcció determinada. Igual que en els casos dels elements lineals, les maneres d’aconseguir-ho són diverses.
Quan les molles i els amortidors torsionals són de comportament lineal, l’increment de moment que introdueixen entre els sòlids, quan l’orientació relativa entre ells s’incrementa en un angle [math]\displaystyle{ \Delta \theta }[/math], és proporcional a [math]\displaystyle{ \Delta \theta }[/math] i [math]\displaystyle{ \dot{\theta} }[/math], respectivament (Figura D3.8).

D3.4 Interaccions d’enllaç directes
Les interaccions directes d’enllaç entre dos sòlids [math]\displaystyle{ \mathrm{S}_1 }[/math] i [math]\displaystyle{ \mathrm{S}_2 }[/math] es produeixen quan estan en contacte, i provenen de les petites deformacions locals dels sòlids en la zona de contacte. Des del punt de vista macroscòpic, això es tradueix en impenetrabilitat i rugositat dels sòlids. Com ja s’ha comentat a la secció D2.7, en tractar aquest curs de la dinàmica d’objectes rígids, les deformacions no es formulen, i per tant les forces associades són incògnites del problema dinàmic.
Quan els enllaços impliquen sòlids (no partícules), cal precisar si són llisos o rugosos. Una superfície llisa no pot impedir que un element llisqui respecte d’ella tot mantenint-hi contacte, mentre que una de rugosa sí que ho pot impedir. Això té una conseqüència directa en la caracterització de l’enllaç.
Com a introducció a la caracterització d’enllaços entre sòlids, és útil considerar el cas més senzill del contacte puntual.
Considerem dos sòlids rígids [math]\displaystyle{ \mathrm{S}1 }[/math] i [math]\displaystyle{ \mathrm{S}2 }[/math] que mantenen un contacte puntual entre ells. Els punts de contacte són [math]\displaystyle{ \Ps_1 }[/math] i [math]\displaystyle{ \Ps_2 }[/math] , respectivament. La caracterització de l’enllaç que [math]\displaystyle{ \mathrm{S}2 }[/math] fa sobre [math]\displaystyle{ \Ps_1 }[/math] (o que [math]\displaystyle{ \mathrm{S}1 }[/math] fa sobre [math]\displaystyle{ \Ps_2 }[/math] ) s’obté de manera anàloga a la de l’enllaç partícula-superfície (Figura D3.9).

Quan l’enllaç entre [math]\displaystyle{ \mathrm{S}1 }[/math] i [math]\displaystyle{ \mathrm{S}2 }[/math] és multipuntual, la condició d’ortogonalitat entre força d’enllaç i velocitat permesa es pot aplicar a cada punt on es produeix contacte (la qual cosa implica acceptar que l’enllaç multipuntual es pot obtenir com a superposició d’enllaços puntuals independents). De vegades, això condueix a un nombre de components de forces d’enllaç elevat (fins i tot infinit, si el contacte es produeix al llarg d’un tram lineal o superficial continu), i cal reduir el sistema de forces a un torsor resultant d’enllaç. En alguns casos, aquesta reducció es pot obtenir molt fàcilment a partir de la descripció de l’enllaç punt a punt.
Si bé és possible calcular el torsor d’un sistema de forces en qualsevol punt (secció D3.1), quan es tracta de torsors d’enllaç és convenient que aquest punt pertanyi al sòlid sotmès al sistema de forces en qüestió, perquè d’això se'n deriva una propietat important.
✏️ Exemple D3.3: torsor d’enllaç en un contacte bipuntual

- El bloc manté contacte bipuntual amb un terra llis, i es mou només en un pla.

- La descripció de l’enllaç com a superposició de dos enllaços puntuals condueix a dues forces normals: Si només hi hagués contacte a [math]\displaystyle{ \Ps }[/math], l’enllaç introduiria només una força a [math]\displaystyle{ \Ps }[/math] normal al terra ([math]\displaystyle{ \Ns_\mathrm{P} }[/math]); si el contacte fos només a [math]\displaystyle{ \Qs }[/math], introduiria una força a [math]\displaystyle{ \Qs }[/math] normal al bloc ([math]\displaystyle{ \Ns_\mathrm{Q} }[/math]). Els valors de [math]\displaystyle{ \Ns_\mathrm{P} }[/math] i [math]\displaystyle{ \Ns_\mathrm{Q} }[/math] són independents (conèixer [math]\displaystyle{ \Ns_\mathrm{P} }[/math] no implica conèixer [math]\displaystyle{ \Ns_\mathrm{Q} }[/math] ). El contacte bipuntual, doncs, introdueix dues incògnites d’enllaç.
En tractar-se només de dues forces, la reducció a un torsor no és necessària, Per altra banda, aquesta descripció és útil per estudiar les dues condicions límit: [math]\displaystyle{ \Ns_\mathrm{P}=0 }[/math] indica pèrdua de contacte a [math]\displaystyle{ \Ps }[/math] (per tant, bolcament en sentit horari), mentre que [math]\displaystyle{ \Ns_\mathrm{Q}=0 }[/math] indica pèrdua de contacte a [math]\displaystyle{ \Qs }[/math] (per tant, bolcament en sentit antihorari).
En aquest cas, el torsor associat a aquest sistema de forces no redueix el nombre d’incògnites, que segueix sent 2. La força resultant té dues components independents:
[math]\displaystyle{ \left\{\overline{\mathrm{F}}_{\mathrm{T} \rightarrow \text { bloc }}\right\}=\left\{\begin{array}{l} \mathrm{F}_1 \\ \mathrm{F}_2 \\ 0 \end{array}\right\} \text {, amb }\left\{\begin{array}{l} \mathrm{F}_1=-\mathrm{N}_{\mathrm{Q}} \sin \theta \\ \mathrm{F}_2=\mathrm{N}_{\mathrm{p}}+\mathrm{N}_{\mathrm{Q}} \cos \theta \end{array}\right. \text {. } }[/math]
El moment resultant depèn del punt del bloc on es caracteritza el torsor, i quan no és nul, es pot escriure en funció de les components de força.

Passar de la descripció punt a punt al torsor no té cap avantatge en aquest cas: no redueix el nombre d’incògnites d’enllaç, i dificulta l’estudi de les condicions límit.
✏️ Exemple D3.4: torsor d’enllaç en un contacte al llarg d’una línia contínua

- El corró es troba en contacte amb lliscament sobre un terra horitzontal [math]\displaystyle{ \mathrm{S} }[/math]. La descripció de l’enllaç multipuntual com a superposició d’enllaços puntuals condueix a un conjunt d’infinites forces [math]\displaystyle{ \Ns_{\rightarrow \mathrm{J}} }[/math] als punts de contacte [math]\displaystyle{ \mathbf{J} }[/math] en la direcció normal al terra (direcció 3). La força resultant d’enllaç sobre el corró, per tant, és també de direcció 3, i ha de ser estrictament positiva ja que és un enllaç unilateral:
[math]\displaystyle{ \int_{\mathrm{J} \in \text { corró }} \mathrm{N}_{\rightarrow \mathrm{J}}=\mathrm{N}\gt 0 . }[/math]
El moment resultant d’enllaç depèn del punt del corró on es calculi. Si es tria un punt extrem del contacte ([math]\displaystyle{ \Ps }[/math] o [math]\displaystyle{ \Qs }[/math]), el moment resultant té signe definit:
[math]\displaystyle{ \{\overline{\mathbf{M}}(\mathbf{P})\}=\left\{\int_{\text {J} \in \mathrm{corró }} \overline{\mathbf{P J}} \times \overline{\mathbf{N}}_{\rightarrow \mathrm{J}}\right\}=\left\{\begin{array}{c} 0 \\ \mathbf{M}_2\gt 0 \\ 0 \end{array}\right\},\{\overline{\mathbf{M}}(\mathbf{Q})\}=\left\{\int_{\text {J} \in \mathrm{corró }} \overline{\mathbf{QJ}} \times \overline{\mathbf{N}}_{\rightarrow \mathrm{J}}\right\}=\left\{\begin{array}{c} 0 \\ \mathbf{M}_2\lt 0 \\ 0 \end{array}\right\} . }[/math]

La descripció de l’enllaç per mitjà del torsor és molt avantatjosa: redueix dràsticament el nombre d’incògnites d’enllaç (passem a tenir-ne només dues). Si el torsor es caracteritza a [math]\displaystyle{ \Ps }[/math] o a [math]\displaystyle{ \Qs }[/math], l’estudi de la condició límit de bolcament és fàcil: [math]\displaystyle{ \mathrm{M}_2=0 }[/math]. Si es caracteritza en qualsevol altre punt de la generatriu de contacte, cal passar a [math]\displaystyle{ \Ps }[/math] o a [math]\displaystyle{ \Qs }[/math] per investigar el bolcament.
Caracterització analítica del torsor d’enllaç entre dos sòlids rígids [math]\displaystyle{ \mathrm{S}1 }[/math] i [math]\displaystyle{ \mathrm{S}2 }[/math]
La caracterització del torsor d’enllaç entre dos sòlids es pot fer sense passar per la descripció de l’enllaç punt a punt: si el punt de caracterització pertany a un dels dos sòlids, n’hi ha prou en combinar la condició d’ortogonalitat entre força i velocitat a cada punt de contacte amb la cinemàtica de sòlid rígid, i sumar totes les equacions que en resulten (Figura D3.13).

Figura D3.13 Caracterització analítica d’un enllaç multipuntual entre dos sòlids.
Els vectors [math]\displaystyle{ \overline{\mathbf{v}}_\mathrm{S2}(\Ps) \text{ i }\overline{\boldsymbol{\Omega}}_\mathrm{S2}^\mathrm{S1} }[/math] es poden treure factor comú. Finalment:
[math]\displaystyle{ \Biggl(\sum_\mathrm{J} \overline{\mathbf{F}}_{\rightarrow \mathrm{J}} \Biggl) \cdot \overline{\mathbf{v}}_\mathrm{S2}(\Ps) + \Biggr[ \sum_\mathrm{J} (\overline{\mathbf{PJ}} \times \mathbf{F}_{\rightarrow \mathrm{J}}) \Biggr] \cdot \overline{\boldsymbol{\Omega}}_\mathrm{S2}^\mathrm{S1} = 0 \Rightarrow \overline{\mathbf{F}}_{\mathrm{S2}\rightarrow \mathrm{S1}}\cdot \overline{\mathbf{v}}_\mathrm{S2}(\Ps) + \overline{\mathbf{M}}_{\mathrm{S2}\rightarrow \mathrm{S1}}(\Ps) \cdot \overline{\boldsymbol{\Omega}}_\mathrm{S2}^\mathrm{S1}=0 }[/math]
Aquesta equació és l’equació de caracterització analítica del torsor d’enllaç. Expressa l’ortogonalitat entre el torsor d’enllaç [math]\displaystyle{ \bigl\{ \overline{\mathbf{F}}_{\mathrm{S2}\rightarrow \mathrm{S1}} \quad \overline{\mathbf{M}}_{\mathrm{S2}\rightarrow \mathrm{S1}}(\Ps)\bigl\}^\top }[/math] i el torsor cinemàtic [math]\displaystyle{ \bigl\{\overline{\mathbf{v}}_\mathrm{S2}(\Ps) \quad \overline{\boldsymbol{\Omega}}_\mathrm{S2}^\mathrm{S1} \bigl\}^\top }[/math] de [math]\displaystyle{ \mathrm{S1} }[/math] respecte de [math]\displaystyle{ \mathrm{S2} }[/math]:[math]\displaystyle{ \left\{\begin{array}{c}
\overline{\mathbf{F}}_{\mathrm{S2}\rightarrow \mathrm{S1}}\\
\overline{\mathbf{M}}_{\mathrm{S2}\rightarrow \mathrm{S1}}(\Ps)
\end{array}\right\} \cdot \left\{\begin{array}{c}
\overline{\mathbf{v}}_\mathrm{S2}(\Ps)\\
\overline{\boldsymbol{\Omega}}_\mathrm{S2}^\mathrm{S1}
\end{array}\right\} =0. }[/math]
Aquesta ortogonalitat no implica ortogonalitat entre força i velocitat per una banda, i entre moment i velocitat angular per l’altra. En principi,[math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{S2}\rightarrow \mathrm{S1}}\cdot \overline{\mathbf{v}}_\mathrm{S2}(\Ps) \neq 0 \text{, } \overline{\mathbf{M}}_{\mathrm{S2}\rightarrow \mathrm{S1}}(\Ps) \cdot \overline{\boldsymbol{\Omega}}_\mathrm{S2}^\mathrm{S1} \neq 0 }[/math].
Quan es fa servir l’equació de caracterització analítica, cal considerar inicialment que tant la força com el moment resultants tenen les tres components no nul·les. Pel que fa al torsor cinemàtic, cal escriure les seves components no nul·les en funció dels GL de [math]\displaystyle{ \mathrm{S1} }[/math] respecte de [math]\displaystyle{ \mathrm{S2} }[/math].
Per altra banda, en aparèixer multiplicades escalarment la força i la velocitat del punt per una banda, i el moment i la velocitat angular per l’altra, es poden fer servir bases vectorials diferents per a cadascun d’aquests productes escalars, doncs el seu resultat no depèn de la base:
[math]\displaystyle{ \bigl\{\overline{\mathbf{F}}_{\mathrm{S2}\rightarrow \mathrm{S1}} \bigl\}_\mathrm{B} \cdot \bigl\{\overline{\mathbf{v}}_\mathrm{S2}(\Ps) \bigl\}_\mathrm{B} + \bigl\{\overline{\mathbf{M}}_{\mathrm{S2}\rightarrow \mathrm{S1}}(\Ps) \bigl\}_\mathrm{B'} \cdot \bigl\{\overline{\boldsymbol{\Omega}}_\mathrm{S2}^\mathrm{S1} \bigl\}_\mathrm{B'} }[/math]
✏️ Exemple D3.5: caracterització analítica del torsor d’enllaç en un contacte al llarg d’una línia contínua

- El corró no llisca sobre el terra horitzontal [math]\displaystyle{ \mathrm{S} }[/math]. La caracterització analítica del torsor de l’enllaç directe del terra sobre el corró, al punt [math]\displaystyle{ \Ps }[/math] és:
- [math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{S}\rightarrow \mathrm{corró}}\cdot \overline{\mathbf{v}}_\mathrm{S}(\Ps) + \overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}}(\Ps) \cdot \overline{\boldsymbol{\Omega}}_\mathrm{S}^\mathrm{corró}=0 }[/math]
[math]\displaystyle{ \left\{\begin{array}{c}
\mathrm{F}_1\\
\mathrm{F}_2 \\
\mathrm{F}_3
\end{array}\right\}
\cdot \left\{\begin{array}{c}
0\\
0\\
0
\end{array}\right\} + \left\{\begin{array}{c}
\mathrm{M}_1\\
\mathrm{M}_2 \\
\mathrm{M}_3
\end{array}\right\} \cdot \left\{\begin{array}{c}
\Omega_1\\
0 \\
0
\end{array}\right\} =0 }[/math]
Totes les components del torsor d’enllaç tret de [math]\displaystyle{ \mathrm{M}_1 }[/math] poden tenir qualsevol valor, doncs van multiplicades per zero. En canvi, com que [math]\displaystyle{ \Omega_1 }[/math] no és zero en principi, [math]\displaystyle{ \mathrm{M}_1 }[/math] ha de ser zero per tal de que es compleixi l’equació d’ortogonalitat. Així doncs, el torsor resultant d’enllaç és:
[math]\displaystyle{ \bigl\{ \overline{\mathbf{F}}_{\mathrm{S}\rightarrow \mathrm{corró}} \quad \overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}}(\Ps)\bigl\}^\top = \bigl\{\mathrm{F}_1 \quad \mathrm{F}_2 \quad \mathrm{F}_3 \qquad 0 \quad \mathrm{M}_2 \quad \mathrm{M}_3 \bigl\}^\top . }[/math]
Com s'ha comentat a l’exemple D3.4, M2 ha de ser positiu. Un valor negatiu seria indicatiu de bolcament.
Les cinc components no nul·les són independents, i es compleix que la suma del nombre de components independents del torsor i el de GL del corró respecte de [math]\displaystyle{ \mathrm{S} }[/math] és 6.
El torsor del mateix enllaç en un punt diferent es pot obtenir bé aplicant novament l’equació de caracterització analítica bé a partir del torsor a [math]\displaystyle{ \Ps }[/math] (secció D3.1). Per exemple, per al punt [math]\displaystyle{ \mathbf{C} }[/math] aquests dos mètodes condueixen a:
- Caracterització analítica: [math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{S}\rightarrow \mathrm{corró}}\cdot \overline{\mathbf{v}}_\mathrm{S}(\mathbf{C}) + \overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}}(\mathbf{C}) \cdot \overline{\boldsymbol{\Omega}}_\mathrm{S}^\mathrm{corró}=0 }[/math]
- [math]\displaystyle{ \left\{\begin{array}{c} \mathrm{F}_1\\ \mathrm{F}_2 \\ \mathrm{F}_3 \end{array}\right\} \cdot \left\{\begin{array}{c} 0\\ \mathrm{v}_2 = - \rs \Omega_1\\ 0 \end{array}\right\} + \left\{\begin{array}{c} \mathrm{M'}_1\\ \mathrm{M'}_2 \\ \mathrm{M'}_3 \end{array}\right\} \cdot \left\{\begin{array}{c} \Omega_1\\ 0 \\ 0 \end{array}\right\} = 0 \quad \Rightarrow \quad \bigl\{ \overline{\mathbf{F}}_{\mathrm{S}\rightarrow \mathrm{corró}} \bigl\}= \left\{\begin{array}{c} \mathrm{F}_1\\ ...\\ \mathrm{F}_3 \end{array}\right\} \quad \text{,} \quad \bigl\{ \overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}} (\mathbf{C}) \bigl\} =\left\{\begin{array}{c} ...\\ \mathrm{M'}_2 \\ \mathrm{M'}_3 \end{array}\right\} }[/math]
- [math]\displaystyle{ (-\rs \mathrm{F}_2 + \mathrm{M'}_1)\Omega_1 =0 \quad \Rightarrow \quad -\rs\mathrm{F}_2 + \mathrm{M'}_1=0 }[/math]
Finalment: [math]\displaystyle{ \bigl\{ \overline{\mathbf{F}}_{\mathrm{S}\rightarrow \mathrm{corró}} \bigl\}=\left\{\begin{array}{c}
\mathrm{F}_1\\
\mathrm{F}_2 \\
\mathrm{F}_3
\end{array}\right\}\quad \text{,} \quad \bigl\{ \overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}} (\mathbf{C}) \bigl\} =\left\{\begin{array}{c}
\mathrm{M'}_1\\
\mathrm{M'}_2 \\
\mathrm{M'}_3
\end{array}\right\} }[/math], amb [math]\displaystyle{ \mathrm{M'}_1=\rs\mathrm{F}_2 }[/math]
- Obtenció a partir del torsor a [math]\displaystyle{ \Ps }[/math]: [math]\displaystyle{ \overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}} (\mathbf{C})=\overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}} (\mathbf{P})+ \overline{\mathbf{CP}} \times \overline{\mathbf{F}}_{\mathrm{S}\rightarrow \mathrm{corró}} }[/math]
- [math]\displaystyle{ \bigl\{ \overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}} (\mathbf{C}) \bigl\} =\left\{\begin{array}{c}
0\\
\mathrm{M}_2 \\
\mathrm{M}_3
\end{array}\right\}+ \left\{\begin{array}{c}
0\\
0 \\
-\rs
\end{array}\right\} \times \left\{\begin{array}{c}
\mathrm{F}_1\\
\mathrm{F}_2 \\
\mathrm{F}_3
\end{array}\right\} = \left\{\begin{array}{c}
\rs \mathrm{F}_2\\
\mathrm{M}_2 - \rs \mathrm{F}_1 \\
\mathrm{M}_3
\end{array}\right\} \equiv \left\{\begin{array}{c}
\mathrm{M'}_1\\
\mathrm{M'}_2 \\
\mathrm{M'}_3
\end{array}\right\} }[/math]
- Finalment: [math]\displaystyle{ \bigl\{ \overline{\mathbf{F}}_{\mathrm{S}\rightarrow \mathrm{corró}} \bigl\}=\left\{\begin{array}{c}
\mathrm{F}_1\\
\mathrm{F}_2 \\
\mathrm{F}_3
\end{array}\right\}\quad \text{,} \quad \bigl\{ \overline{\mathbf{M}}_{\mathrm{S}\rightarrow \mathrm{corró}} (\mathbf{C}) \bigl\} =\left\{\begin{array}{c}
\mathrm{M'}_1\\
\mathrm{M'}_2 \\
\mathrm{M'}_3
\end{array}\right\} }[/math], amb [math]\displaystyle{ \mathrm{M'}_1=\rs\mathrm{F}_2 }[/math]
El nombre de components no nul·les del torsor a [math]\displaystyle{ \mathbf{C} }[/math] és 6, però el nombre de components independents és 5, doncs hi ha una relació de dependència entre [math]\displaystyle{ \mathrm{M}_1' }[/math] i [math]\displaystyle{ \mathrm{F}_2 }[/math] . Per tant, segueix complint-se que el nombre de components independents de torsor més el de GL és 6.
✏️ Exemple D3.6: caracterització analítica del torsor d’enllaç en un contacte puntual sense lliscament

- La bola de radi r no llisca dins la cavitat esfèrica. La caracterització analítica del torsor de l’enllaç directe de la cavitat sobre la bola, al seu centre [math]\displaystyle{ \mathbf{G} }[/math] és:
[math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{cav}\rightarrow \mathrm{bola}}\cdot \overline{\mathbf{v}}_\mathrm{cav}(\mathbf{G}) + \overline{\mathbf{M}}_{\mathrm{cav}\rightarrow \mathrm{bola}}(\mathbf{G}) \cdot \overline{\boldsymbol{\Omega}}_\mathrm{cav}^\mathrm{bola}=0 }[/math]
- [math]\displaystyle{ \left\{\begin{array}{c} \mathrm{F}_1\\ \mathrm{F}_2 \\ \mathrm{F}_3 \end{array}\right\} \cdot \left\{\begin{array}{c} \mathrm{v}_1\\ 0\\ \mathrm{v}_3 \end{array}\right\} + \left\{\begin{array}{c} \mathrm{M}_1\\ \mathrm{M}_2 \\ \mathrm{M}_3 \end{array}\right\} \cdot \left\{\begin{array}{c} \Omega_1\\ \Omega_2\\ \Omega_3 \end{array}\right\} = 0 \quad \Rightarrow \quad \bigl\{ \overline{\mathbf{F}}_{\mathrm{cav}\rightarrow \mathrm{bola}} \bigl\}= \left\{\begin{array}{c} ...\\ \mathrm{F}_2\\ ... \end{array}\right\} \quad \text{,} \quad \bigl\{ \overline{\mathbf{M}}_{\mathrm{cav}\rightarrow \mathrm{bola}} (\mathbf{G}) \bigl\} =\left\{\begin{array}{c} ...\\ ... \\ ... \end{array}\right\} }[/math]
En no haver-hi lliscament al punt de contacte, les components de velocitat [math]\displaystyle{ \mathrm{v}_1 }[/math] i [math]\displaystyle{ \mathrm{v}_3 }[/math] són proporcionals a [math]\displaystyle{ \Omega_3 }[/math] i [math]\displaystyle{ \Omega_1 }[/math] , respectivament: [math]\displaystyle{ \mathrm{v}_1=-\rs \Omega_3 }[/math], [math]\displaystyle{ \mathrm{v}_3=\rs \Omega_1 }[/math] (el signe negatiu de la primera igualtat indica que una [math]\displaystyle{ \Omega_3 }[/math] positiva genera una [math]\displaystyle{ \mathrm{v}_1 }[/math] negativa). Substituïnt a l’equació de caracterització i desenvolupant el producte escalar (sense incloure la component [math]\displaystyle{ \mathrm{F}_2 }[/math] , perquè va multiplicada per zero):
[math]\displaystyle{ (-\rs \mathrm{F}_1 + \mathrm{M}_3) \Omega_3 + (\rs \mathrm{F}_3 + \mathrm{M}_1) \Omega_1 + \mathrm{M}_2\Omega_2=0. }[/math]
Com que les tres rotacions són independents, els coeficients que les multipliquen han de ser zero perquè l’equació es compleixi per a qualsevol valor de [math]\displaystyle{ \Omega_3 }[/math] i de [math]\displaystyle{ \Omega_1 }[/math]: [math]\displaystyle{ -\rs \mathrm{F}_1 + \mathrm{M}_3=0 }[/math] ,[math]\displaystyle{ \rs \mathrm{F}_3 + \mathrm{M}_1 }[/math] , [math]\displaystyle{ \mathrm{M}_2=0 }[/math].
Finalment:
[math]\displaystyle{ \bigl\{ \overline{\mathbf{F}}_{\mathrm{cav}\rightarrow \mathrm{bola}} \quad \overline{\mathbf{M}}_{\mathrm{cav}\rightarrow \mathrm{bola}}(\mathbf{G})\bigl\}^\top = \bigl\{\mathrm{F}_1 \quad \mathrm{F}_2 \quad \mathrm{F}_3 \qquad \mathrm{M}_1 \quad 0 \quad \mathrm{M}_3 \bigl\}^\top }[/math], amb [math]\displaystyle{ \mathrm{M}_3=\rs \mathrm{F}_1 }[/math] i [math]\displaystyle{ \mathrm{M}_1=-\rs \mathrm{F}_3. }[/math]
El torsor té cinc components no nul·les, però només tres són independents, i es compleix que la suma del nombre de components independents del torsor i el de GL de la bola respecte de la cavitat és 6.
Aquest torsor també es pot obtenir a partir de la caracterització a [math]\displaystyle{ \mathbf{J} }[/math] (secció D3.1). En tractar-se d’un contacte puntual sense lliscament, a [math]\displaystyle{ \mathbf{J} }[/math] hi ha tres components de força d’enllaç i cap moment:
[math]\displaystyle{ \bigl\{ \overline{\mathbf{F}}_{\mathrm{cav}\rightarrow \mathrm{bola}} \quad \overline{\mathbf{M}}_{\mathrm{cav}\rightarrow \mathrm{bola}}(\mathbf{J})\bigl\}^\top = \bigl\{\mathrm{F}_1 \quad \mathrm{F}_2 \quad \mathrm{F}_3 \qquad 0 \quad 0 \quad 0 \bigl\}^\top }[/math]
[math]\displaystyle{ \overline{\mathbf{M}}_{\mathrm{cav}\rightarrow \mathrm{bola}} (\mathbf{G})=\overline{\mathbf{M}}_{\mathrm{cav}\rightarrow \mathrm{bola}} (\mathbf{J})+ \overline{\mathbf{GJ}} \times \overline{\mathbf{F}}_{\mathrm{cav}\rightarrow \mathrm{bola}} = \overline{\mathbf{GJ}} \times \overline{\mathbf{F}}_{\mathrm{cav}\rightarrow \mathrm{bola}} }[/math]
[math]\displaystyle{ \bigl\{ \overline{\mathbf{M}}_{\mathrm{cav}\rightarrow \mathrm{bola}} (\mathbf{G}) \bigl\} = \left\{\begin{array}{c}
0\\
-\rs\\
0
\end{array}\right\} \times \left\{\begin{array}{c}
\mathrm{F}_1\\
\mathrm{F}_2 \\
\mathrm{F}_3
\end{array}\right\} = \left\{\begin{array}{c}
-\rs \mathrm{F}_3\\
0 \\
\rs \mathrm{F}_1
\end{array}\right\} \equiv \left\{\begin{array}{c}
\mathrm{M}_1\\
0 \\
\mathrm{M}_3
\end{array}\right\} }[/math]
Com s’ha vist als exemples anteriors, l’equació de caracterització analítica garanteix que la suma del nombre de components independents del torsor d’enllaç entre dos sòlids i del nombre de GL relatius entre els sòlids és sempre 6:
Caracterització immediata del torsor d’enllaç
Quan es tria un punt [math]\displaystyle{ \Ps }[/math] de caracterització la velocitat del qual,[math]\displaystyle{ \overline{\mathbf{v}}_{\mathrm{S1}}(\Ps) }[/math], és independent de [math]\displaystyle{ \overline{\mathbf{\Omega}}_{\mathrm{S1}}^{\mathrm{S2}} }[/math], i una base vectorial tal que les components de [math]\displaystyle{ \overline{\mathbf{v}}_{\mathrm{S1}}(\Ps) }[/math] són independents entre elles i les de [math]\displaystyle{ \overline{\mathbf{\Omega}}_{\mathrm{S1}}^{\mathrm{S2}} }[/math] també, la caracterització és immediata: a cada component nul·la del torsor cinemàtic li correspon una component no nul·la del torsor d'enllaç, i a cada component no nul·la del torsor cinemàtic li correspon una component nul·la del torsor d'enllaç.
✏️ Exemple D3.7: caracterització immediata del torsor d’enllaç en un contacte multipuntual continu

La mola cònica no llisca sobre el terra cònic (T). La caracterització del torsor de l’enllaç directe del terra sobre qualsevol dels punts de contacte [math]\displaystyle{ \mathbf{J} }[/math] de la mola amb el terra pot ser immediata, perquè [math]\displaystyle{ \vvec_\mathrm{T}(\mathbf{J}) }[/math] independentment de la velocitat angular mola [math]\displaystyle{ \velang{mola}{T} }[/math] .
Perquè ho sigui realment, cal triar una base vectorial per expressar el moment d’enllaç tal que els components de mola [math]\displaystyle{ \velang{mola}{T} }[/math] siguin independents. Ja que la direcció de mola [math]\displaystyle{ \velang{mola}{T} }[/math] està unívocament determinada (la mola te 1 GL respecte del terra), qualsevol base que tingui un eix paral·lel a l’EIRL de la mola és adequada:

- Finalment: [math]\displaystyle{ \braq{\fvec{T}{mola}}{} = \vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\quad \text{,} \quad \braq{\mvec{T}{mola}(\mathbf{J})}{} = \vector{\mathrm{M}_1}{0}{\mathrm{M}_3}. }[/math]
✏️ Exemple D3.8: caracterització del torsor d’enllaç d’una unió helicoïdal

La caracterització del torsor de l’enllaç directe del mascle de la unió helicoïdal sobre la femella no pot ser immediata,
En una unió helicoïdal, no hi ha cap punt de la femella que tingui velocitat respecte del mascle independent de la rotació entre les dues peces. Per tant, la caracterització immediata no és possible.
Si es tria com a punt de caracterització qualsevol punt [math]\displaystyle{ \mathbf{O} }[/math] de l’eix 3, la caracterització analítica condueix a:
[math]\displaystyle{ \fvec{mascle}{femella}\cdot \vvec_\mathrm{mascle}(\mathbf{O})+ \mvec{mascle}{femella}(\mathbf{O}) \cdot \velang{femella}{mascle}=0 }[/math]
[math]\displaystyle{ \vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\vector{0}{0}{\mathrm{v}_3}+\vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3}\vector{0}{0}{\Omega_3}=0 \quad \Rightarrow \quad \braq{\fvec{mascle}{femella}}{}=\vector{\mathrm{F}_1}{\mathrm{F}_2}{...}\quad \text{,} \quad \braq{\mvec{mascle}{femella}(\mathbf{O})}{}=\vector{\mathrm{M}_1}{\mathrm{M}_2}{...}. }[/math]
La velocitat d’[math]\displaystyle{ \mathbf{O} }[/math] al llarg de l’eix és directament proporcional a la rotació per mitjà del pas de rosca e. Ja que [math]\displaystyle{ \Omega_3 }[/math] es mesura en rad/s, [math]\displaystyle{ \mathrm{v}_3 }[/math] en m/s, i e es dóna en mm/volta, cal fer una conversió d’unitats:
[math]\displaystyle{ \mathrm{v}_3\left[\frac{\ms}{\ss}\right] = \Omega_3\left[\frac{\mathrm{rad}}{\ss}\right]\es\left[\frac{\mathrm{mm}}{\mathrm{ volta}}\right]\frac{1 \ms}{10^3 \mathrm{ mm}}\frac{1 \mathrm{volta}}{2 \pi \mathrm{ rad}} \Rightarrow \mathrm{v}_3= \Omega_3 \frac{\es}{2 \pi \cdot 10^3} }[/math]
Finalment: [math]\displaystyle{ \braq{\fvec{mascle}{femella}}{}=\vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\quad \text{,} \quad \braq{\mvec{mascle}{femella}(\mathbf{O})}{}=\vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3} }[/math], amb [math]\displaystyle{ \mathrm{M}_3= -\frac{\es}{2 \pi \cdot 10^3} \mathrm{F}_3 }[/math]
Torsors d'enllaç associats als enllaços directes habituals entre sòlids rígids
Els enllaços habituals entre parelles de sòlids rígids s’han analitzat des del punt de vistacinemàtic. A partir d’aquesta descripció, es poden caracteritzar els torsors d’enllaç corresponents (Figura D3.11).

Figura D3.11 Caracterització immediata dels enllaços directes habituals
En els sistemes multisòlid formats únicament per sòlids rígids amb massa no negligible connectats mitjançant aquests enllaços habituals, la descripció dinàmica dels enllaços es fa considerant per separat cada parella de sòlids connectats com si la resta d’elements del sistema no hi fos.
✏️ EXEMPLE D3.9: anàlisi d’incògnites en un sistema multisòlid
El sistema multisòlid conté 5 enllaços habituals:
Tenint en compte que una articulació introdueix 5 components independents de torsor d’enllaç, un enllaç cilíndric n’introdueix 4, i un d’esfèric 3, en el sistema hi ha un total de 22 incògnites d’enllaç. |

D3.5 Interaccions d’enllaç indirectes: Sòlids Auxiliars d’Enllaç
En els sistemes multisòlid, és freqüent que alguns sòlids tinguin massa negligible comparats amb els altres i que no reben altres interaccions que les d’enllaç amb altres sòlids. Aquests sòlids s’anomenen Sòlids Auxiliars d’Enllaç (SAE), i se’ls pot donar un tractament particular quan es tracta de caracteritzar enllaços.
La Figura D3.12 presenta un sòlid [math]\displaystyle{ \mathrm{S1} }[/math] en contacte amb un sòlid [math]\displaystyle{ \mathrm{S} }[/math] de massa negligible, que no està sotmès a cap interacció que no sigui d’enllaç, en dues situacions diferents: [math]\displaystyle{ \mathrm{S} }[/math] només en contacte amb [math]\displaystyle{ \mathrm{S1} }[/math] (Figura D3.12a) i [math]\displaystyle{ \mathrm{S} }[/math] en contacte amb dos sòlids [math]\displaystyle{ \mathrm{S1} }[/math] i [math]\displaystyle{ \mathrm{S2} }[/math] (Figura D3.12b).

Figura D3.12 Interacció entre sòlids rígids [math]\displaystyle{ \mathrm{S1} }[/math] i[math]\displaystyle{ \mathrm{S2} }[/math] per mitjà d’un sòlid auxiliar d’enllaç (SAE).
En absència de [math]\displaystyle{ \mathrm{S2} }[/math], la presència de [math]\displaystyle{ \mathrm{S} }[/math] (en contacte amb [math]\displaystyle{ \mathrm{S1} }[/math]) és dinàmicament irrellevant: [math]\displaystyle{ \mathrm{S} }[/math] no representa cap obstacle per moure [math]\displaystyle{ \mathrm{S1} }[/math]. Conseqüentment, [math]\displaystyle{ \mathrm{S} }[/math] no és capaç d’introduir cap força d’enllaç sobre [math]\displaystyle{ \mathrm{S1} }[/math].
Però quan [math]\displaystyle{ \mathrm{S} }[/math] interconnecta [math]\displaystyle{ \mathrm{S1} }[/math] i [math]\displaystyle{ \mathrm{S2} }[/math], [math]\displaystyle{ \mathrm{S} }[/math] esdevé un transmissor: [math]\displaystyle{ \mathrm{S2} }[/math] pot ser un obstacle quan es tracta de provocar certs moviments de [math]\displaystyle{ \mathrm{S1} }[/math], i això es tradueix en forces d’enllaç sobre [math]\displaystyle{ \mathrm{S1} }[/math].
Com a cas senzill per il·lustrar-ho, la Figura D3.13 mostra dos exemples (que considerarem plans) on dos sòlids [math]\displaystyle{ \mathrm{S1} }[/math] i [math]\displaystyle{ \mathrm{S2} }[/math] sobre un pla llis estan connectats a través d’una barra de massa negligible (comparada amb la de [math]\displaystyle{ \mathrm{S1} }[/math] i la de [math]\displaystyle{ \mathrm{S2} }[/math]) articulada en els dos extrems. Assumirem que:
(a) les articulacions són perfectes (sense frec)
(b) una de les articulacions té un molla torsional associada

Figura D3.13 Enllaç indirecte entre dos sòlids rígids [math]\displaystyle{ \mathrm{S1} }[/math] i [math]\displaystyle{ \mathrm{S2} }[/math] per mitjà d’una barra [math]\displaystyle{ \mathrm{S} }[/math] articulada de massa negligible.
En el cas (a), la barra és un SAE (no està sotmesa a cap interacció que no sigui d’enllaç). Provocar velocitat del punt [math]\displaystyle{ \mathbf{O} }[/math] de [math]\displaystyle{ \mathrm{S1} }[/math] en la direcció de la barra implica moure [math]\displaystyle{ \mathrm{S} }[/math] i [math]\displaystyle{ \mathrm{S2} }[/math] . En canvi, moure [math]\displaystyle{ \mathbf{O} }[/math] en la direcció ortogonal a la barra provoca moviment de [math]\displaystyle{ \mathrm{S} }[/math] però no de [math]\displaystyle{ \mathrm{S2} }[/math] , mentre que fer girar [math]\displaystyle{ \mathrm{S1} }[/math] al voltant de [math]\displaystyle{ \mathbf{O} }[/math] no provoca el moviment de cap dels dos (ni de [math]\displaystyle{ \mathrm{S} }[/math] ni de [math]\displaystyle{ \mathrm{S2} }[/math] ). En conseqüència, només té sentit associar una força d’enllaç sobre [math]\displaystyle{ \mathrm{S1} }[/math] en la direcció de la barra. El responsable d’aquesta força no és [math]\displaystyle{ \mathrm{S} }[/math] sinó [math]\displaystyle{ \mathrm{S2} }[/math] : quan es tracta de caracteritzar l’enllaç sobre [math]\displaystyle{ \mathrm{S1} }[/math] , la cinemàtica de [math]\displaystyle{ \mathrm{S1} }[/math] s’ha devaluar des de [math]\displaystyle{ \mathrm{S2} }[/math]. Es diu que entre [math]\displaystyle{ \mathrm{S1} }[/math] i [math]\displaystyle{ \mathrm{S2} }[/math] hi ha un enllaç indirecte a través del SAE.
En el cas (b), la barra no és un SAE perquè està sotmesa a una interacció que no és d’enllaç (la de la molla). Com en el cas (a), moure [math]\displaystyle{ \mathbf{O} }[/math] en la direcció de la barra obliga a moure [math]\displaystyle{ \mathrm{S2} }[/math] . Però ara, el moviment de [math]\displaystyle{ \mathbf{O} }[/math] en direcció perpendicular a la barra obliga a deformar la molla, la qual actua sobre [math]\displaystyle{ \mathrm{S2} }[/math] i el fa bellugar. El moviment de rotació de [math]\displaystyle{ \mathrm{S1} }[/math] al voltant de [math]\displaystyle{ \mathbf{O} }[/math] segueix sent possible sense haver de moure [math]\displaystyle{ \mathrm{S2} }[/math] ni deformar la molla. En la caracterització de l’enllaç sobre [math]\displaystyle{ \mathrm{S1} }[/math] , cal avaluar la cinemàtica de [math]\displaystyle{ \mathrm{S1} }[/math] de manera que [math]\displaystyle{ \mathbf{O} }[/math] no tingui velocitat : cal avaluar-la des de S.
✏️ Exemple D3.10: caracterització d’un enllaç indirecte

El carretó té 2 GL lliures respecte del terra (translació longitudinal i rotació vertical). Si la massa dels tres elements (rodes i xassís) és comparable, la representació simplificada del sistema i el nombre d’incògnites d’enllaç que conté és la següent:

En total, doncs, el sistema conté 17 incògnites d’enllaç.
Aquest nombre es pot reduir en el cas que la massa de les rodes sigui negligible (comparada amb la del xassís): el xassís passa a tenir tres enllaços amb el terra, un de directe i dos d’indirectes a través de les rodes, que són SAE. El nombre d’incògnites que introdueix un d’aquests enllaços indirectes no és sempre evident a priori, i és aconsellable caracteritzar-lo analíticament. Cal recordar, però, que la cinemàtica que es descriu correspon a la que té el xassís respecte del terra com si només hi actués l’enllaç que es considera. En aquest cas, doncs, en la caracterització de l’enllaç indirecte entre terra i xassís a través de les rodes cal avaluar la cinemàtica com si el contacte directe amb el terra (a la part del davant del xassís) no hi fos.
Caracterització del torsor de l’enllaç indirecte entre el terra i el xassís per mitjà d'una roda , al punt [math]\displaystyle{ \mathbf{C} }[/math] i per a la base (1,2,3):

[math]\displaystyle{ \overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(roda)} \rightarrow \mathrm{xassís}} \cdot \vvec_\Ts (\Cs) + \overline{\mathbf{M}}_{\Ts \rightarrow \mathrm{(roda)} \rightarrow \mathrm{xassís}}(\Cs) \cdot \velang{xassís}{T}=0 }[/math]
[math]\displaystyle{ \vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\vector{\mathrm{v}_1}{\mathrm{v}_2}{0}+ \vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3} \vector{\Omega_1}{\Omega_2}{\Omega_3}=0 \Rightarrow \braq{\overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(roda)} \rightarrow \mathrm{xassís}}}{}=\vector{...}{...}{\mathrm{F}_3} }[/math]
La velocitat [math]\displaystyle{ \mathrm{v}_1 }[/math] només és possible si hi ha rotació [math]\displaystyle{ \Omega_2: \mathrm{v}_1=\rs\Omega_2 }[/math]. Si s’introdueix aquesta relació i es desenvolupa el producte escalar:
[math]\displaystyle{ (\rs\mathrm{F}_1+\mathrm{M}_2)\Omega_2 + \mathrm{F}_2\mathrm{v}_2+ \mathrm{M}_1 \Omega_1 +\mathrm{M}_3 \Omega_3=0 }[/math]
Ja que [math]\displaystyle{ (\mathrm{v}_2,\Omega_1,\Omega_2,\Omega_3) }[/math] són independents, els coeficients de cadascuna d’aquestes velocitats ha de ser zero. Per tant, l’enllaç indirecte introdueix només 2 incògnites:
[math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(roda)} \rightarrow \mathrm{xassís}}}{}=\vector{\mathrm{F}_1}{0}{\mathrm{F}_3} \quad \text{,} \quad \braq{\overline{\mathbf{M}}_{\Ts \rightarrow \mathrm{(roda)} \rightarrow \mathrm{xassís}}(\Os)}{}=\vector{0}{\mathrm{M}_2}{0} }[/math], amb [math]\displaystyle{ \mathrm{M}_2=-\rs \mathrm{F}_1 }[/math]
✏️ Exemple D3.11: caracterització d’un enllaç indirecte


| La placa té el vèrtex [math]\displaystyle{ \Ps }[/math] obligat a moure’s dins la guia, i el punt [math]\displaystyle{ \Qs }[/math] connectat al punt [math]\displaystyle{ \Os }[/math] del terra (T) mitjançant una barra amb articulacions als extrems. El sistema té només 1 GL, descrit per mitjà de [math]\displaystyle{ \dot{\theta} }[/math]. Si es considera el problema només en dues dimensions i cap element té massa negligible, el nombre total d’incògnites d’enllaç és 5. |
| Si la barra és de massa negligible i es tracta com a SAE, la caracterització del torsor de l’enllaç indirecte entre el terra i la placa per mitjà de la barra al punt [math]\displaystyle{ \Qs }[/math] és:
|

✏️ Exemple D3.12: caracterització d’un enllaç indirecte



La bola té 4 GL lliures respecte del terra (translacions al llarg de l’eix r-r’ i de l’eix 2, rotacions al voltant de l’eix r-r’ i de l’eix 2). Si no hi ha cap element de massa negligible, el nombre total d’incògnites d’enllaç és 8.
Si l’element T és de massa negligible i es tracta com a SAE, la caracterització del torsor de l’enllaç indirecte entre el terra i la bola per mitjà d’aquest element al punt [math]\displaystyle{ \Gs }[/math] és:
[math]\displaystyle{ \overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(elemT)} \rightarrow \mathrm{bola}} \cdot \vvec_\Ts (\Gs) + \overline{\mathbf{M}}_{\Ts \rightarrow \mathrm{(elemT)} \rightarrow \mathrm{bola}}(\Gs) \cdot \velang{bola}{T}=0 }[/math]
[math]\displaystyle{ \vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\vector{\mathrm{v}_1}{\mathrm{v}_2}{\mathrm{v}_3} + \vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3} \vector{\Omega_1}{\Omega_2}{0}=0 \quad \Rightarrow \quad \braq{\overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(elemT)} \rightarrow \mathrm{bola}}}{}=\vector{...}{...}{...} \quad \text{,} \quad \braq{\overline{\mathbf{M}}_{\Ts \rightarrow \mathrm{(elemT)} \rightarrow \mathrm{bola}}(\Gs)}{}=\vector{...}{...}{\mathrm{M}_3} }[/math]
La velocitat [math]\displaystyle{ \mathrm{v}_3 }[/math] només és possible si l’element T (i per tant la bola) giren amb [math]\displaystyle{ \Omega_2 }[/math] : [math]\displaystyle{ \mathrm{v}_3=-\xs\Omega_2 }[/math]. Si s’introdueix aquesta relació i es desenvolupa el producte escalar:
[math]\displaystyle{ \mathrm{F}_1\mathrm{v}_1+\mathrm{F}_2\mathrm{v}_2+(-\xs\mathrm{F}_3+\mathrm{M}_2)\Omega_2+\mathrm{M}_1\Omega_1 }[/math]
[math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(elemT)} \rightarrow \mathrm{bola}}}{}=\vector{0}{0}{\mathrm{F}_3} \quad \text{,} \quad \braq{\overline{\mathbf{M}}_{\Ts \rightarrow \mathrm{(elemT)} \rightarrow \mathrm{bola}}(\Gs)}{}=\vector{0}{\mathrm{M}_2}{\mathrm{M}_3} }[/math], amb [math]\displaystyle{ \mathrm{M}_2=\xs\mathrm{F}_3 }[/math]
Tot i que el torsor a [math]\displaystyle{ \Gs }[/math] té tres components no nul·les, d’independents només n’hi ha dues.
Un cas paradigmàtic en què la dimensió es redueix dràsticament és el del coixinet de boles (Figura D3.14). Si es tracta el problema com a pla i les N boles no es consideren SAE, el nombre d’incògnites d’enllaç del sistema és 4N (cada bola manté contacte puntual sense llisament amb els dos sòlids [math]\displaystyle{ \mathrm{S1} }[/math] i [math]\displaystyle{ \mathrm{S2} }[/math], i en el cas pla,el contacte puntual es redueix a dues incògnites d’enllaç). Si es tracten com a SAE, l’enllaç indirecte entre [math]\displaystyle{ \mathrm{S1} }[/math] i [math]\displaystyle{ \mathrm{S2} }[/math] a través de les boles es redueix a dues incògnites d’enllaç.

Figura D3.14 Coixinet de boles.
✏️ Exemple D3.13: anàlisi d’enllaços en un sistema multisòlid

- El sistema multisòlid té 2 GL respecte del terra: la translació circular de la placa respecte de l’eix i la rotació de tots els elements al voltant de l’eix vertical (permesa pel coixinet). Si cap element té massa negligible, el nombre: total d’incògnites d’enllaç és 25.
- Si es negligeixen les masses de l’eix i de les dues barres i es tracten com a SAE, el sistema es redueix a un enllaç indirecte:
- [math]\displaystyle{ \overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(SAE)} \rightarrow \mathrm{placa}} \cdot \vvec_\Ts (\Gs) + \overline{\mathbf{M}}_{\Ts \rightarrow \mathrm{(SAE)} \rightarrow \mathrm{placa}}(\Gs) \cdot \velang{placa}{T}=0 }[/math]
- [math]\displaystyle{ \vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\vector{\mathrm{v}_1}{\mathrm{v}_2}{\mathrm{v}_3} + \vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3} \vector{0}{\Omega_2}{0}=0 \quad \Rightarrow \quad \braq{\overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(SAE)} \rightarrow \mathrm{placa}}}{}=\vector{...}{...}{...} \quad \text{,} \quad \braq{\overline{\mathbf{M}}_{\Ts \rightarrow \mathrm{(SAE)} \rightarrow \mathrm{placa}}(\Gs)}{}=\vector{\mathrm{M}_1}{...}{\mathrm{M}_3} }[/math]
- La velocitat [math]\displaystyle{ \mathrm{v}_3 }[/math] prové de la rotació del conjunt al voltant de l’eix vertical: [math]\displaystyle{ \mathrm{v}_3=-(\mathrm{h} + \mathrm{Lcos}\theta)\Omega_2 }[/math] . Les velocitats [math]\displaystyle{ \mathrm{v}_1 }[/math] i [math]\displaystyle{ \mathrm{v}_2 }[/math] provenen de la translació circular de la placa, i per tant no són independents: [math]\displaystyle{ \frac{\mathrm{v}_1}{\mathrm{v}_2}=-\mathrm{tan}\theta }[/math]
- Si es desenvolupa el producte escalar tenint en compte aquestes relacions:
- [math]\displaystyle{ (-\mathrm{F}_1\mathrm{tan}\theta+\mathrm{F}_2)\mathrm{v}_2+ [-(\hs+\Ls\mathrm{cos}\theta)\mathrm{F}_3+\mathrm{M}_2]\Omega_2=0, }[/math]
- [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\Ts \rightarrow \mathrm{(SAE)} \rightarrow \mathrm{placa}}}{}=\vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3} \quad \text{,} \quad \braq{\overline{\mathbf{M}}_{\Ts \rightarrow \mathrm{(SAE)} \rightarrow \mathrm{placa}}(\Gs)}{}=\vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3} }[/math], amb [math]\displaystyle{ \mathrm{F}_2=\mathrm{F}_1\mathrm{tan}\theta }[/math] i [math]\displaystyle{ \mathrm{M}_2=(\hs+\Ls\mathrm{cos}\theta)\mathrm{F}_3 }[/math]
- El nombre d’incògnites d’enllaç s’ha reduït a 4.
✏️ Exemple D3.14: anàlisi d’enllaços en un sistema multisòlid

- Si al sistema de l’ exemple D3.13 se li afegeix una molla torsional amb un extrem lligat a l’eix, el nombre de GL no es modifica, però en la descripció dels enllaços, l’eix no es pot tractar com a SAE encara que la seva massa sigui negligible. Les dues barres, però, segueixen estant sotmeses només a interaccions d’enllaç, i per tant, si es negligeix la seva massa, són SAE:
- [math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{eix} \rightarrow \mathrm{(barres)} \rightarrow \mathrm{placa}} \cdot \vvec_\mathrm{eix} (\Gs) + \overline{\mathbf{M}}_{\mathrm{eix} \rightarrow \mathrm{(barres)} \rightarrow \mathrm{placa}}(\Gs) \cdot \velang{placa}{eix}=0 }[/math]
- [math]\displaystyle{ \vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\vector{-\mathrm{v}_2\mathrm{tan}\theta}{\mathrm{v}_2}{0} + \vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3} \vector{0}{0}{0}=0 \quad \Rightarrow \quad \braq{\overline{\mathbf{F}}_{\mathrm{eix} \rightarrow \mathrm{(barres)} \rightarrow \mathrm{placa}}}{}=\vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3} \quad \text{,} \quad \braq{\overline{\mathbf{M}}_{\mathrm{eix} \rightarrow \mathrm{(barres)} \rightarrow \mathrm{placa}}(\Gs)}{}=\vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3}, \mathrm{F}_2=\mathrm{F}_1\mathrm{tan}\theta }[/math]
- El nombre total d’incògnites d’enllaç és 10: 5 associades a l’enllaç indirecte que s’acaba de caracteritzar, i 5 més al coixinet entre terra i eix.

D3.6 Interaccions per mitjà d’actuadors lineals i rotacionals
Els actuadors (o accionaments) són elements concebuts per controlar un grau de llibertat (de translació o de rotació) entre dos sòlids i eliminar-ne d’altres.
Externament, un actuador són dues peces que entre elles només tenen el GL a controlar (en el cas d’actuador rotacionals, aquestes peces s’anomenen estator i rotor). Quan s’insereix entre dos sòlids [math]\displaystyle{ \mathrm{S}_1 }[/math] i [math]\displaystyle{ \mathrm{S}_2 }[/math], la manera com es connecta als sòlids determina els GL eliminats entre ells. En aquest curs, la massa dels actuador es considera negligible sempre.
La interacció entre [math]\displaystyle{ \mathrm{S}1 }[/math] i [math]\displaystyle{ \mathrm{S}2 }[/math] , doncs, es descriu mitjançant una força [math]\displaystyle{ \mathrm{F}_\mathrm{ac} }[/math] o un parell [math]\displaystyle{ \Gamma }[/math] (o moment), segons que es tracti d’un actuador lineal o rotacional, i un torsor d’enllaç.
Hi ha dues maneres de descriure el sistema format per [math]\displaystyle{ \mathrm{S}1 }[/math], [math]\displaystyle{ \mathrm{S}2 }[/math], [math]\displaystyle{ \mathrm{P}1 }[/math] i [math]\displaystyle{ \mathrm{P}2 }[/math]:
- Opció 1: Es tracten [math]\displaystyle{ \mathrm{P}1 }[/math] i [math]\displaystyle{ \mathrm{P}2 }[/math] com a dos sòlids més del sistema. Entre elles, el torsor de l’enllaç directe es caracteritza com si l’actuador estigués desactivat (permetent el GL que controla entre les dues peces quan està activat). Tant si l’actuador és lineal com si és rotacional, el torsor d’enllaç conté 5 components independents. A més, entre [math]\displaystyle{ \mathrm{P}1 }[/math] i [math]\displaystyle{ \mathrm{P}2 }[/math] hi ha la força [math]\displaystyle{ \mathrm{F}_\mathrm{ac} }[/math] o el parell [math]\displaystyle{ \Gamma }[/math]. La interacció entre [math]\displaystyle{ \mathrm{S}1 }[/math] i [math]\displaystyle{ \mathrm{P}1 }[/math], i entre [math]\displaystyle{ \mathrm{S}2 }[/math] i [math]\displaystyle{ \mathrm{P}2 }[/math] es descriu mitjançant l’enllaç corresponent.
- Opció 2: Es considera l’actuador desactivat, i es tracten [math]\displaystyle{ \mathrm{P}1 }[/math] i [math]\displaystyle{ \mathrm{P}2 }[/math] com a SAE. La interacció entre [math]\displaystyle{ \mathrm{S}1 }[/math] i [math]\displaystyle{ \mathrm{S}2 }[/math] queda explicada llavors mitjançant el torsor de l’enllaç indirecte associat a aquesta cadena de SAEs, i la força [math]\displaystyle{ \mathrm{F}_\mathrm{ac} }[/math] o el parell [math]\displaystyle{ \Gamma }[/math] .
✏️ Exemple D3.15: actuador lineal entre dos sòlids
| L’actuador lineal, de massa negligible, actua entre terra i pèndol, i controla la velocitat del punt [math]\displaystyle{ \Os }[/math] en la direcció 1.Es tracta de descriure la interacció entre el terra i el pèndol. |

Opció 1
Ja que la peça 1 de l’actuador està enganxada a terra, es poden considerar com a una de sola. La peça 2, en canvi, no està enganxada sinó articulada al pèndol.

La caracterització a [math]\displaystyle{ \Os }[/math] dels dos enllaços és immediata:
- Enllaç prismàtic: [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\mathrm{terra}\rightarrow\mathrm{P}2}}{}=\vector{0}{\Fs_2}{\Fs_3}, \braq{\overline{\mathbf{M}}_{\mathrm{terra}\rightarrow\mathrm{P}2}(\Os)}{}=\vector{\Ms_1}{\Ms_2}{\Ms_3} }[/math]
- Articulació: [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\mathrm{P}2\rightarrow\mathrm{pèndol}}}{}=\vector{\Fs_1}{\Fs_2}{\Fs_3}, \braq{\overline{\mathbf{M}}_{\mathrm{P}2\rightarrow\mathrm{pèndol}}(\Os)}{}=\vector{\Ms_1}{\Ms_2}{0} }[/math]
Opció 2
El torsor de l’enllaç indirecte entre terra i pèndol a través de l’actuador es pot caracteritzar analíticament:
- [math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{terra} \rightarrow \mathrm{(ac)} \rightarrow \mathrm{pèndol}} \cdot \vvec_\mathrm{terra} (\Os) + \overline{\mathbf{M}}_{\mathrm{terra} \rightarrow \mathrm{(ac)} \rightarrow \mathrm{pèndol}}(\Os) \cdot \velang{pèndol}{terra}=0 }[/math]
- [math]\displaystyle{ \vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\vector{\mathrm{v}_1}{0}{0} + \vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3} \vector{0}{0}{\Omega_3}=0 \quad \Rightarrow \quad \braq{\overline{\mathbf{F}}_{\mathrm{terra} \rightarrow \mathrm{(ac)} \rightarrow \mathrm{pèndol}}}{}=\vector{0}{\mathrm{F}_2}{\mathrm{F}_3} \quad \text{,} \quad \braq{\overline{\mathbf{M}}_{\mathrm{terra} \rightarrow \mathrm{(ac)} \rightarrow \mathrm{pèndol}}(\Os)}{}=\vector{\mathrm{M}_1}{\mathrm{M}_2}{0} }[/math]
- En aquest cas, la caracterització a [math]\displaystyle{ \Os }[/math] és immediata.
- Les interaccions entre terra i pèndol per causa de l’actuador es resumeixen en el diagrama següent:

✏️ Exemple D3.16: actuador lineal entre dos sòlids
| L’actuador lineal actua entre el suport i l’hèlix, i controla la velocitat del punt [math]\displaystyle{ \Os }[/math] en la direcció 2 (la qual cosa fa girar l’hèlix sempre i quan no es passi per configuracions singulars – per exemple, quan la direcció de l’actuador és vertical i passa per [math]\displaystyle{ \Os }[/math]). Es tracta de descriure la interacció entre el suport i l’hèlix. |

Opció 1
Cap de les peces que formen l’actuador és fixa al suport ni a l’hèlix. Per tant:

La caracterització dels tres enllaços és immediata:
- Articulació: [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\mathrm{suport}\rightarrow\mathrm{P}1}}{}=\vector{\Fs_1}{\Fs_2}{\Fs_3}, \braq{\overline{\mathbf{M}}_{\mathrm{suport}\rightarrow\mathrm{P}1}(\Os')}{}=\vector{\Ms_1}{\Ms_2}{0} }[/math]
- Enllaç prismàtic: [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\mathrm{terra}\rightarrow\mathrm{P}2}}{}=\vector{0}{\Fs_2}{\Fs_3}, \braq{\overline{\mathbf{M}}_{\mathrm{terra}\rightarrow\mathrm{P}2}(\Os)}{}=\vector{\Ms_1}{\Ms_2}{\Ms_3} }[/math]
- Articulació: [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\mathrm{P}2\rightarrow\mathrm{pèndol}}}{}=\vector{\Fs_1}{\Fs_2}{\Fs_3}, \braq{\overline{\mathbf{M}}_{\mathrm{P}2\rightarrow\mathrm{pèndol}}(\Os)}{}=\vector{\Ms_1}{\Ms_2}{0} }[/math]
Opció 2
- El torsor de l’enllaç indirecte entre suport i hèlix a través de l’actuador és nul: en haver-hi ròtules esfèriques als dos extrems de l’actuador, el punt [math]\displaystyle{ \Os }[/math] podria tenir velocitat en totes les direccions respecte del suport.
- La interacció entre suport i hèlix a través de l’actuador es redueix a una força (que ès la força [math]\displaystyle{ \Fs_{ac} }[/math] que fa l’actuador quan està activat):

✏️ Exemple D3.17: actuador rotacional entre dos sòlids
| El motor, de massa negligible, actua entre terra i anella, i controla la velocitat angular entre els dos.Es tracta de descriure la interacció entre el terra i l’anella. Opció 1 En aquest cas, l’estàtor (P1) és fix a terra, i el rotor (P2) és fix a l’anella. Per tant, només té sentit l’opció 1. Les interaccions entre terra i anella per causa de l’actuador es resumeixen en el diagrama següent: El torsor de l’enllaç entre terra (+P1) i anella (+P2) és el que correspon a una articulació, i la seva caracterització és immediata: [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\mathrm{terra}\rightarrow\mathrm{anella}}}{}=\vector{\Fs_1}{\Fs_2}{\Fs_3}, \braq{\overline{\mathbf{M}}_{\mathrm{terra}\rightarrow\mathrm{anella}}(\Os)}{}=\vector{\Ms_1}{\Ms_2}{0} }[/math] |


✏️ Exemple D3.18: actuador rotacional entre dos sòlids
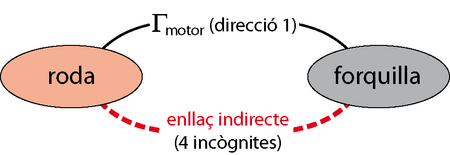
| El motor actua entre la forquilla i la roda, i controla la velocitat angular entre els dos.Es tracta de descriure la interacció entre la forquilla i la roda. |

Opció 1
Una de les peces que formen l’actuador (el rotor) és fixa a la roda. Per tant:

La caracterització dels dos enllaços és immediata:
- Articulació: [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\mathrm{forquilla}\rightarrow\mathrm{P}1}}{}=\vector{\Fs_1}{\Fs_2}{\Fs_3}, \braq{\overline{\mathbf{M}}_{\mathrm{forquilla}\rightarrow\mathrm{P}1}(\Os)}{}=\vector{\Ms_1}{0}{\Ms_3} }[/math]
- Articulació: [math]\displaystyle{ \braq{\overline{\mathbf{F}}_{\mathrm{P}1\rightarrow\mathrm{roda}}}{}=\vector{\Fs_1}{\Fs_2}{\Fs_3}, \braq{\overline{\mathbf{M}}_{\mathrm{P}1\rightarrow\mathrm{roda}}(\Os)}{}=\vector{0}{\Ms'_2}{\Ms'_3} }[/math]
Opció 2
- La caracterització de l'enllaç indirecte entre forquilla i roda a través del motor és:
- [math]\displaystyle{ \overline{\mathbf{F}}_{\mathrm{forq} \rightarrow \mathrm{(motor)} \rightarrow \mathrm{roda}} \cdot \vvec_\mathrm{forq} (\Os) + \overline{\mathbf{M}}_{\mathrm{forq} \rightarrow \mathrm{(motor)} \rightarrow \mathrm{roda}}(\Os) \cdot \velang{roda}{forq}=0 }[/math]
- [math]\displaystyle{ \vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3}\vector{0}{0}{0} + \vector{\mathrm{M}_1}{\mathrm{M}_2}{\mathrm{M}_3} \vector{\Omega_1}{\Omega_2}{0}=0 \quad \Rightarrow \quad \braq{\overline{\mathbf{F}}_{\mathrm{forq} \rightarrow \mathrm{(motor)} \rightarrow \mathrm{roda}}}{}=\vector{\mathrm{F}_1}{\mathrm{F}_2}{\mathrm{F}_3} \quad \text{,} \quad \braq{\overline{\mathbf{M}}_{\mathrm{forq} \rightarrow \mathrm{(motor)} \rightarrow \mathrm{roda}}(\Os)}{}=\vector{0}{0}{\mathrm{M}_3} }[/math]
- La interacció entre forquilla i roda a través del motor es resumeix en el diagrama següent:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.png){kind=link}
{kind=link}
{kind=link}
.png){kind=link}
{kind=link}
{kind=link}
.png){kind=link}
{kind=link}
{kind=link}
{kind=link}
© Universitat Politècnica de Catalunya. Tots els drets reservats